Vincenzo Calabrò ci racconta un progetto che lo vede protagonista insieme al gruppo della MDM Team. Nasce tutto a Firenze ma si svilupperà a Vulcano
E’ possibile creare un robot capace di aiutare l’uomo nella gestione delle emergenze? La risposta è sì e arriva da un’idea che punta ad usare la robotica per prevenire i rischi ambientali. Il progetto si chiama ROMERO e ambisce a sviluppare un nuovo sistema integrato di monitoraggio ed allerta da utilizzare in ambienti ad elevato rischio naturale, come ad esempio vulcani attivi. Un lavoro che in questo momento sta impegnando la MDM Team Srl e il Dipartimento per la Protezione Civile dell’Università degli Studi di Firenze, supportati da un finanziamento europeo legato al progetto ESMERA che punta a realizzare un esperimento di Robotica di Emergenza.
Messina avrà una sua parte da protagonista in questa sperimentazione che potrebbe aprire la strada ad un nuovo modo di prevenire e gestire le emergenze. Tra le menti del MDM Team, infatti, c’è anche un giovane ingegnere messinese. Si chiama Vincenzo Calabrò, è un ingegnere, e ad inizio 2019 è approdato in questa società fiorentina, dopo aver lavorato tanto nel settore della ricerca, specializzandosi soprattutto in sottomarini e robotica sottomarina. Dopo gli studi in Toscana e tanti progetti di ricerca importanti, Vincenzo ha lavorato in Norvegia per diversi anni. Poi la possibilità di tornare in Italia, per continuare a cimentarsi in quello che è lavoro ma anche grande passione.
Come funzionerà
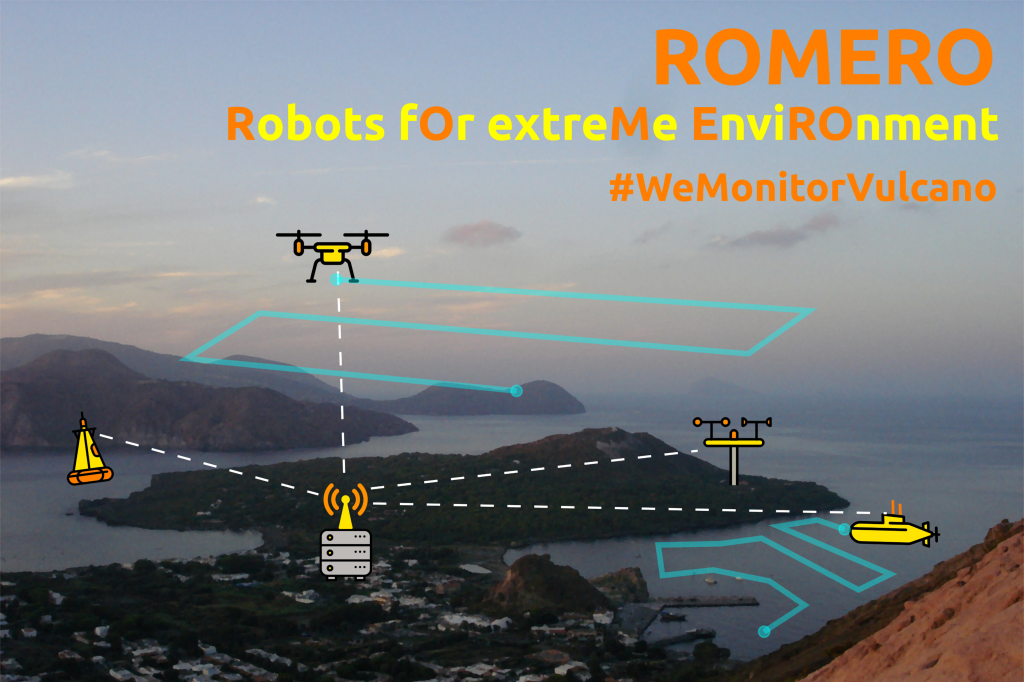
Oggi tutto questo si traduce nel sistema Romero. Che nasce e si sviluppa in Toscana ma che troverà sperimentazione nell’isola di Vulcano. Il sistema si compone di sensori per il monitoraggio ambientale marino e di superficie, di droni aerei e veicoli sottomarini autonomi. Lo sviluppo di questo sistema integrato avverrà in due fasi, l’ultima delle quali si concluderà nel 2021 con l’esperimento finale presso l’isola di Vulcano nelle Isole Eolie. Il sistema Romero analizzerà le proprietà dell’acqua in prossimità delle fuoriuscite di gas naturale presenti nelle zone costiere, lo stato dei venti e del cratere del vulcano, nonché raccoglierà all’occorrenza dati sottomarini in prossimità di tali zone costiere. In futuro le applicazioni potrebbero essere tantissime. Giusto per fare due esempi che riguardano il territorio messinese, questo robot potrebbe essere usato per tracciare gli inquinanti del petrolchimico di Milazzo oppure per monitorare l’attività di eruzione dello Stromboli.
Le parole di Vincenzo

E’ proprio Vincenzo Calabrò a spiegare con entusiasmo e orgoglio il lavoro che c’è dietro Romero e la soddisfazione di poter finalmente dopo tanti anni vedere applicato il suo lavoro nella sua terra. «Una doppia soddisfazione per un messinese che spera di poter contribuire così a trovare sempre nuovi metodi per rendere sicuri i territori. Riuscire ad integrare moderni sistemi robotici in ambienti estremi è una sfida tecnologica che punta a migliorare il monitoraggio di zone a rischio, rendendo efficaci le comunicazioni verso le autorità competenti per facilitare la presa di decisioni. Come messinese inoltre, avere l’opportunità di testare queste tecnologie nella mia amata terra, ed in particolare nelle Isole Eolie, un luogo così speciale a me assai caro, rappresenta un sogno diventato realtà».